552PED/2020
A sedation patient simulator for patient-individualised optimal drug dosing in general anaesthesia
Research grant awarded by UEFISCDI Romania www.uefiscdi.gov.ro, project code: PN-III-P2-2.1-PED-2019-0322, 552PED/2020
SUMMARY
A patient’s well-being during/after surgery is drastically affected by the application of general anaesthesia. Some components of anaesthesia are well characterised and described in the literature ( hypnosis and neuromuscular blockade), however the analgesia model is missing entirely. Research upon the influence of the surgical stimulus on the patient and how it affects anaesthesia is also at its early beginning. A combined full model of these subsystems within the general anaesthesia paradigm is not yet investigated. Novel is also the multivariable predictive controller envisaged for the automatic control of anaesthesia. Both the full model and the controller are necessary to produce the final result of this project. The demonstration model to be developed and validated consists in a sedation patient simulator for patient-individualised optimal drug dosing in general anaesthesia. This simulator will be used as a benchmark to systematically allow the community for simulating various situations and testing various control algorithms and to create awareness and introduce the concept for practitioners in health institutions worldwide. It will also enable small and medium enterprises to pick up new technological advances necessary for commercial production of such sedation patient simulator for drug delivery medical applications. At least two benefits result from the development of such a sedation patient simulator. An optimal drug dosing system for sedation can significantly reduce costs due to two reasons: lower drug costs, as well as lower hospitalisation times. Finally, it has to be stated that for some of the benefits, it is hard to calculate cost, such as increased patient’s well-being when reducing Intensive Care Unit stay and a decreased nursing workload. All in all, the delivery of this demonstrator will enable further medical-engineering research towards anaesthesia regulatory paradigm.
PROJECT OBJECTIVES
The present project aims to address the issue of personalised medicine by applying readily available know-how to obtain an experimental, proof of concept patient- specific targeted drug delivery system to be used in both open, as well as closed loop analysis with applications to anesthesia paradigm. The demonstration model to be developed and validated consists in a sedation patient simulator for patient-individualised optimal drug dosing in general anaesthesia.
PROJECT REPORTS
Raport_stiintific_PED552_2020_website_compressed
Raport_stiintific_PED552_2021_website_compressed
Raport_stiintific_PED552_2022_compressed
OVERALL PROJECT RESULTS
1. to characterize the effects of physiological time delays in the complete system, and the consequences for control performance and requirements for control algorithms/architecture.
2. to deliver a simulator of the complete system at hand, with mixed real-data and mimicked signals from real life situations.
3. to deliver a bullet-proof analysis of a complete regulatory dynamic system for controlling general anesthesia by means of all its three components: hypnosis, analgesia and neuromuscular blockade, also under surgical stimulus (acting as disturbance).
OVERALL SCIENTIFIC RESULTS
STAGE 1
- Protocol for alternating absence/presence of thermal pain stimuli; we will use the standardized water-ice bucket thermal pain test and measured data.
STAGE 2
- Mathematical model for pain latency and memory
- Complete anaesthesia model
- Open loop patient simulator
- Interaction analysis and control performance limitations from presence of variable delay from the pain model
- Predictive control strategy for patient simulator
- Closed loop patient simulator
STAGE 3
- Safety limits and possible input-output max/min variation
- Stability analysis
- The effect of time delays on overdosing
DISSEMINATION OF RESULTS
STAGE 1
- Ghita, M. Neckebroek, C. Muresan, D. Copot (2020), Closed-Loop Control of Anesthesia: Survey on Actual Trends, Challenges and Perspectives,” inIEEE Access, vol. 8, pp. 206264-206279, 2020, doi: 10.1109/ACCESS.2020.3037725 (ISI impact factor 3.745)
- A. C. Diaz, M. Ghita, D. Copot, I. R. Birs, C. Muresan and C. Ionescu (2020), Context Aware Control Systems: An Engineering Applications Perspective, IEEE Access, vol. 8, pp. 215550-215569, doi: 10.1109/ACCESS.2020.3041357 (ISI impact factor 3.745)
- Ghita, M.; Neckebroek, M.; Juchem, J.; Copot, D.; Muresan, C.I.; Ionescu, C.M. (2020), Bioimpedance Sensor and Methodology for Acute Pain Monitoring, Sensors, 20, 6765, Doi: 10.3390/s20236765 (ISI impact factor 3.275)
STAGE 2
- Copot, Dana, and Clara Ionescu. Tailored Pharmacokinetic model to predict drug trapping in long-term anesthesia. Journal of advanced research vol. 32 27-36. 21 May. 2021, doi:10.1016/j.jare.2021.04.004 (ISI impact factor 10.497)
- Birs, Isabela, Cristina Muresan, Ovidiu Prodan, Silviu Folea, and Clara Ionescu, An Experimental Approach towards Motion Modeling and Control of a Vehicle Transiting a Non-Newtonian Environment” Fractal and Fractional, no. 3: 104. https://doi.org/10.3390/fractalfract5030104 (ISI impact factor 3.17)
- Erwin Hegedus, Isabela Birs, Cristina Muresan, Fractional Order Control of the Combined Anaesthesia-Hemodynamic System: a Preliminary Study, IFAC-PapersOnLine, Volume 54, Issue 15, 2021,Pages 19-24,ISSN 2405-8963. (ISI PROCEEDINGS)
- Mihaela Ghita, Negin Jalilian, Dana Copot, Clara M. Ionescu, Martine Neckebroek, Modeling and Analysis of Monitored vs. Self-reported Postsurgical Acute Pain in a Clinical Trial, IFAC-PapersOnLine, Volume 54, Issue 15, 2021. (in curs de indexare ISI PROCEEDINGS)
- Isabela Birs, Cristina Muresan, Mihaela Ghita, Maria Ghita, Dana Copot, Martine Neckebroek, Clara Ionescu.”Development and validation of preliminary fractional order impedance models for experimental pain assessment,” 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), 2021, pp. 1-6, doi: 10.1109/ICECCME52200.2021.9590863. (in curs de indexare ISI PROCEEDINGS
- Mihaela Ghita, Dana Copot, Maria Ghita, Martine Neckebroek, Duarte Valerio, Clara M. Ionescu, Online identification of pain model in postanesthesia care unit for drug infusion optimization, 25th International Conference on System Theory, Control and Computing, pp. 188-193, doi: 10.1109/ICSTCC52150.2021.9607227, October 20-23, 2021, Iași, Romania (in curs de indexare ISI PROCEEDINGS)
STAGE 3
- Mihaela Ghita, Isabela R. Birs, Dana Copot, Cristina I. Muresan, Clara M. Ionescu, Bioelectrical Impedance Analysis of Thermal-Induced Cutaneous Nociception, Transactions on Biomedical Engineering, under review (ISI impact factor 4.538)
- Maria Ghita, Mihaela Ghita, Dana Copot, Isabela R. Birs, Cristina Muresan, Clara M. Ionescu, Optimizing radiotherapy with chemotherapy using PKPD modeling for lung cancer, IEEE 20th Jubilee World Symposium on Applied Machine Intelligence and Informatics, March 2-5, 2022, Poprad, Slovakia (ISI PROCEEDINGS)
- Maria Ghita, Mihaela Ghita, Dana Copot, Isabela R. Birs, Robin de Keyser, Clara M. Ionescu, Time-frequency varying tissue impedance properties from noxious stimulation protocols, IEEE 20th Jubilee World Symposium on Applied Machine Intelligence and Informatics, March 2-5, 2022, Poprad, Slovakia (in curs de indexare ISI PROCEEDINGS)
- Mihaela Ghita, Maria Ghita, Copot Dana, Isabela Roxana Birs, Cristina Muresan, Clara-Mihaela Ionescu, Lumped Parametric Model for Skin Impedance Data in Patients with Postoperative Pain, 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Glasgow, United Kingdom, 11-15 July 2022
- Propunere brevet STAND EXPERIMENTAL PENTRU CONTROLUL AUTOMAT AL ANESTEZIEI, numar cerere brevet A00185/11.04.2022.
Prezentare succintă a rezultatelor obținute în cadrul proiectului:
Starea de bine a pacientului în timpul/după intervenția chirurgicală este drastic afectată de aplicarea anesteziei generale. Realizarea unui model demonstrativ care să permită studiul efectelor medicamentelor asupra pacientului devine importantă din această perspectivă.
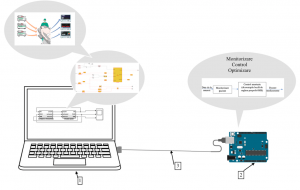
Demonstratorul realizat în cadrul proiectului 552PED/2020 constă din 2 componente principale ce comunică între ele: un sistem de control automat și un simulator sedare pacient. Acest simulator permite studiul și testarea diferitelor scenarii de control automat în anestezie, putând fi utilizat ca reper în personalizarea și ajustarea optimă a dozelor de medicamente. În acest fel, modelul demonstrativ poate fi considerat un prim pas spre un sistem optim de dozare a medicamentelor ce poate reduce semnificativ costurile medicamentelor, precum și timpi de spitalizare redusi. Realizarea acestui simulator pune bazele cercetarilor viitoare in domeniul automatizarii anesteziei.
Rezultatele obținute în cadrul proiectului constau într-o propunere de brevet, 7 lucrări de conferință indexate ISI proceedings, 6 lucrări publicate sau în recenzie în reviste ISI, cu un factor de impact cumulat de 28.97 puncte.
RESEARCH TEAM
Dr. Eng. Clara Ionescu– principal investigator
Dr. Eng. Cristina I. Muresan
Dr. Eng. Ioan Nascu
Dr. Eng. Eva H. Dulf
Dr. Eng. Ovidiu Prodan
Msc. Eng. Isabela Birs